![]()
2.剛体の回転運動
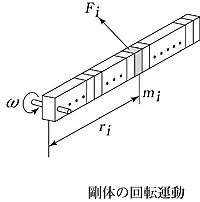
| 一端が回転軸に固定された、棒の回転運動について考える。まず、棒をn個の微小な部分にわけて考え、各部分は質点と見なせるものとする。回転軸からの位置ベクトルがriの微小部分に作用する力をFiとすると、この微小部分に作用する力のモーメントNiはNi=ri×Fiである。位置ベクトルriの微小部分の質量をmi、棒の角速度をωとすると、この微小部分の運動方程式は、 | |
である。ここで、riωは考えている微小部分の速度である。両辺にriを掛けると、 となる。上式はまた、 と、書き表される。そこで、棒全体の総和をとると、 となる。ここで、 |
 |
|
である。ここで、Iを棒の慣性モーメントという。慣性モーメントは剛体の回転運動に対する抵抗の大きさを表す。また、Nは棒全体に作用する力のモーメントである。このように、剛体の慣性モーメントIおよび回転の角加速度( |
|
![]()
2.1 慣性モーメント
質量Mの質点に作用する力をF、その時刻での質点の速度をvとすると、質点の運動方程式は、
![]()
である。一方、慣性モーメントIの剛体に作用する力のモーメントをN、その時刻での角速度をωとすると、
![]()
である。これら、並進運動と回転運動に対する運動方程式を比較すると、
M(質量)→I(慣性モーメント)、v(速度)→ω(角速度)、F(力)→N(力のモーメント)
の対応が成り立つことがわかる。そして、慣性モーメントは質量に対応する量であるから、慣性モーメントは回転運動に対する慣性の大きさであることがわかる。ただし、慣性モーメントは質量とは違い、同じ大きさ、形の剛体でも、回転中心の位置や回転軸、質量分布などが異なるとその大きさは違ってくる。
慣性モーメントは回転中心からの距離の自乗とその点の質量の積できまるので、大きさや形が同じでも、質量分布が回転中心からなるべく遠い位置になるような場合、その値は大きくなる。
例えば、棒の真ん中を回転中心として棒を回転させる場合と、棒の一端を回転中心として回転させる場合とでは、後者の方が慣性モーメントは大きい。また、円板の中心に軸を立てて回転させる場合、同じ半径、同じ質量の円板では、質量が周辺に分布しているほうが慣性モーメントは大きい。
![]()
2.2 剛体の重心(質量中心)
| 剛体をある一点で支えたとき、丁度バランスする位置をその剛体の重心という。地上では剛体には一様に重力が作用するが、これは剛体に作用する、重力による重心の回りの力のモーメントの総和がつり合っていることを意味している。そこで、剛体を各部分が質点と見なせるくらい微小な部分に分割して考え、重心からの位置ri’における微小部分の質量をmiとすると、 | |
|
である。ここで、原点Oからの重心の位置ベクトルをrGとし、微小部分の位置ベクトルをriとすると、ri’=ri-rGである。これを前式に代入して、 である。上式を展開して整理すると、 となる。これより、  |
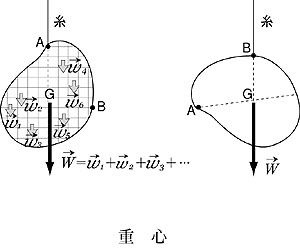 |
| である。これは、剛体を質点系と見なしたときの質量中心の位置に他ならない。従って、剛体の重心はその点に全質量が集中している質点と見なすことができる。 | |
![]()
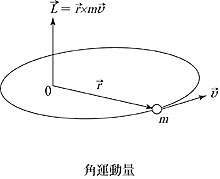
2.3 角運動量
| 質量mの質点Pが、点Oから位置ベクトルrの位置を速度vで運動しているとき、質点Pの位置ベクトルrとその運動量mvとのベクトル積を、質点Pの、点Oの回りの角運動量という。すなわち、角運動量Lは、 | |
| L=r×mv である。 剛体が角速度ωで回転しているとき、回転中心Oからの位置ベクトルriの微小部分の点Oの周りの角運動量Liは、微小部分の質量をmiとすると、 Li=ri×mi(ri・ω) である。そこで、剛体の角運動量Lは全体の総和をとって、 である。この場合も、質点の運動量Mvとの対比より、M→I、v→ωである。 慣性モーメントIの剛体のトルク方程式は、その角運動量Lを用いると、 より、 |
 |
| と、表すことができる。従って、剛体に作用する力のモーメントが0(N=0)の場合、トルク方程式より、 L=Iω=const. である。これは、力のモーメントが作用しない限り、剛体の角運動量は常に一定であることを示している。これを角運動量の保存則という。 |
|
![]()